

13853548008
气动平衡吊是常用于装配和搬运站的起重设备。 气缸中的压力和负载的重量之间的平衡来实现货物在平和中提升和降落。 一旦建立平衡,通常只需要很小的力来提升货物。烟台固德起重机械公司供应智能提升机、气动平衡吊。
气动平衡吊的主体通常包括平衡气缸,丝杆机构,钢丝绳卷筒,控制系统(阀组),以及安全机构(例如超速保护机构)等。
通过气缸内活塞在气缸中的线性往复运动,通过丝杆机构转化为旋转运动带动钢丝绳卷筒的旋转,从而通过钢丝绳来实现提升和降低物品。
气动平衡吊随着技术的发展和用户使用要求的的提高,控制方式从纯气路控制正在逐步向气电结合控制方式转变。气电结合控制方式可以提供更加灵活(例如任意重量平衡)和更加精密(例如精确的速度控制)的使用体验。不过,经典的纯气动控制的平衡吊也由于其经济型和可靠性至今仍然活跃在大量的普通装配和搬运场合。
纯气动控制的气动平衡吊之工作原理
纯气动控制平衡吊的结构简单,组成部件少,成本经济,能适合在恶劣工况环境中使用,因此常在普通的小重量装配和搬运场合见到其应用。
气动控制平衡吊常见的应用包括双重量和三重量平衡。另外有一种“低配”的采用类似于气动葫芦的操控方式,仅提供非常有限行程(通常为20-30厘米)的往复震荡式平衡的气动平衡吊不在本篇的讨论范围之内。本篇着眼于可以在全行程任意位置实现平衡的气动平衡吊的控制方式。
所谓双重量平衡是指平衡缸有两个平衡点,分别是重载平衡和空载平衡。重载平衡是平衡吊上有重物时达到平衡状态,空载平衡是平衡吊上无负载时实现的平衡状态。不管是哪种平衡状态,夹具会处于静止,这时只需一个很小的外力就能实现提升或下降重物或抓具。
我们以双重量平衡为例来分析其工作原理。请参见下图的双重量平衡控制原理图。
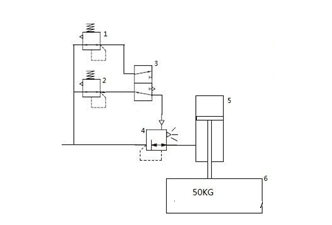
两个先导减压阀(1和2)分别作为控制重载平衡和空载平衡的先导阀。先导阀通过预设的气压(即反映预设的重载和空载重量)来决定气控减压阀(4)的进气口压力。
两路先导气体通入两位三通换向阀(3),换向阀用于切换重载平衡和空载平衡。经过换向阀(3)之后,先导气体通入气控减压阀(4),气控减压阀(4)的出口压力则和对应的先导压力相等。主管路的气体经气控减压阀(4)减压后通入气缸(5),气缸(5)内充入气体后活塞上升,从而将重物拉起。
当重物被吊起后处于静止状态时就说明达到了重载平衡,这时只需一个很小的外力打破这个平衡,就能实现轻松地上提或下放重物。以往下拉重物来打破平衡为例,当使用外力往下拉时,缸内活塞向下移动,这时缸内压力升高,超过了先导阀设定压力(这个设定压力就是平衡时的压力),多余的压力就会从气控减压阀的排放口排出。这样一个过程的结果是:活塞(重物)下降到一定位置静止不动,缸内压力又恢复到之前的平衡压力。反之,往上抬重物打破缸内压力平衡,会导致气控减压阀向气缸注气重新建立平衡。
同理,通过增加先导阀和增加换向阀阀块,还可以实现三重量平衡。
补充说明一下,DEMAG的D-BP气动智能平衡吊可以采用“简配”方式,用比较经济的成本实现双重量和三重量平衡控制模式。
从上述控制原理不难看出,气动平衡吊控制的关键是高精密度的气控减压阀以及对应的反映负载重量的控制信号,这些直接关系到重物的定位准确性,移动重物时需要的外力大小,移动重物的速度。从这个角度出发,进化出了气电一体化控制的新型气动智能平衡吊。
烟台固德起重机械公司,我们秉承“创新、和赢、品质、品牌”经营战略;希望成为您起重的长期合作供应商。
 鲁公网安备 37060202001274号
鲁公网安备 37060202001274号




